Задания к лабораторной работе "Кросс"
и практическому занятию
Задание 1
Составить управляющую программу на ассемблере МП Intel 8080 для микропроцессорного последовательного обнаружителя. Алгоритм обнаружения состоит в накоплении поступивших отсчетов и сравнении с двумя порогами: верхним А=100 и нижним В=-64. При превышении верхнего порога фиксируется обнаружение сигнала, при превышении нижнего - необнаружение. Отсчеты входного процесса, квантованного на 32 уровня (5 двоичных разрядов, включая знак), поступают из порта с адресом h '00, отрицательные числа представлены прямым кодом (единица в 5-разряде - признак отрицательного числа), например:
3 (десятичное) = 0000 0011 (двоичное) = 03 (шестнадцатиричное)
15 (десятичное) = 0000 1111 (двоичное) = 0F (шестнадцатиричное)
-3 (десятичное) = 0001 0011 (двоичное) = 13 (шестнадцатиричное)
-15 (десятичное) = 0001 1111 (двоичное) = 1F (шестнадцатиричное)
При фиксации обнаружения необходимо вывести число 1 на порт с адресом h '01, при фиксации необнаружения единица выводится на порт с адресом h '02.
Задание 2
Составить управляющую программу на ассемблере МП Intel 8080 для микропроцессорного рекурсивного фильтра системы СДЦ с передаточной функцией
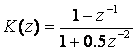 .
.
Входные отсчеты, представленные 16-ю двоичными разрядами в дополнительном коде, поступают из порта с адресом h '00 (младший байт) и порта с адресом h '01 (старший байт). Выходные отсчеты необходимо выдавать на порты с адресами h '10 - младший байт и h '11 - старший байт. Начальные значения предшествующего входного и выходного отсчетов положить нулевыми.
Задание 3
Составить программу на ассемблере МП Intel 8080, реализующую алгоритм оценки азимута цели по данным обзорного радиолокатора для одного канала дальности. Квантованные на 8-разрядов положительные отсчеты отраженного сигнала y i непрерывно поступают на порт с адресом h '00, текущее значение углового положения антенны доступно в регистре с адресом h '01. Пачка состоит из 10 отраженных импульсов. Алгоритм оценки состоит в суммировании отсчетов первой половины пачки со знаком «+», второй половины – со знаком «-» и фиксации момента, когда сумма меняет знак с положительной на отрицательную. В этот момент на порт с адресом h '10 выдается оценка азимута цели как текущее положение антенны. Дополнительным условием выдачи оценки азимута является выполнение критерия обнаружения
 ,
,
где h = 300 – порог обнаружения. Считать, что управление программе оценки азимута передается тогда, когда в порт h '00 уже записан очередной отсчет сигнала.
Задание 4
Составить программу на ассемблере МП Intel 8080 для оценки дальности до объекта фотосъемки по данным активного ультразвукового датчика дистанции. В пространство излучается ультразвуковой импульс длительностью 0,3 мс. Встроенный АЦП преобразует огибающую отраженной волны в цифровой 8-разрядный код с частотой 10 кГц и записывает его в регистр с адресом h '00. Алгоритм измерения дальности состоит в суммировании каждых трех последовательных отсчетов в «скользящем окне дальности», сравнении суммы с порогом h = 150 и в случае его превышения выдачи на порт h '01 кода дальности в виде 8-разрядного нормированного числа. При отсутствии отражающих объектов в этот порт записывается значение условной бесконечности – h ‘ FF . Текущее значение времени в единицах равных 100 мкс, формируемые встроенным таймером, доступны в регистрах h '10 – младший байт и h '11 – старший байт. Программе передается управление в момент излучения зондирующего сигнала.